We are headed out again! This time we are traveling on the RV Endeavor to hopefully map another salinity intrusion. The sea surface temperature satellite map shows a warm core ring located just south of the shelf right where we hoped one would be. The first plan of attack will be to do a CTD transect across the shelf to find if this ring is generating a salinity intrusion. The sea surface temperature map bellow shows where we think the intrusion will be. Lets hope we are right!
A sea surface temperature image from August 27th. The X shows where we believe a salinity intrusion will be.
We are wrapping up the final day of the cruise and we can say it was a great success. We set out to find a salinity intrusion and that is exactly what we found. In the next few month we will begin working on analyzing the data from the AUVs, VMP, and CTD and are excited to bring these results to the larger community
Stay tuned for more updates and to follow our second cruise in September on the RV Endeavor .
Any questions or comments please send to Adrienne at asilver@umassd.edu
Many who read this blog might wonder how life on a research vessel is like. I had never been on a moving ship overnight, so naturally, I expected to be able to feel the boat’s every motion after we left port. The day we launched, Noa and I had ventured into the galley, imagining a picturesque departure where we would watch Cape Cod fade into the horizon while sipping a warm mug of coffee. In reality, the coffee machine was slow and we were impatient, so when we left the still-brewing pot to check on our departure status, we were both shocked to see that we had departed ten minutes ago, and neither of us had felt it (Cape Cod was already in the distance, and we had no coffee in hand to celebrate!).
Although we mostly had calm seas throughout the cruise, the experience could often be how I previously imagined it—hallways tilting like a fun house and gravity seemingly transforming from constant to variable as the ship rolled across the waves. In the gym (which could be found after climbing down a hatch), Noa and I discovered that part of the challenge of weightlifting on a rocking vessel meant anticipating the weight growing suddenly heavier or lighter. During a Pirates of the Caribbean movie night, a particularly sudden roll sent me and my cup of tea stumbling across the room just as a pirate pitched overboard onscreen (definitely a 4D experience!).
AUV team enjoying a sunset after a busy day.
However, we soon adjusted to the staggering pace of life adopted on a research vessel at sea. The days were quite busy, with each team juggling a myriad of tasks and science objectives, each of which was reflected in the two dozen monitors peppered around the room. Salinity charts, CTD graphs, navigation maps, and vehicle tracking interfaces could all be seen with one glance. While our jumble of thoughts lived mostly within the screens, they would occasionally spill across the tables in the form of miscellaneous vehicle parts, colorful images, and VMP components. The lively atmosphere crackled with radio messages, Glen’s energetic announcements about our latest scientific discoveries, and at least one AUV operator yelling to another outside, “We got a range!”
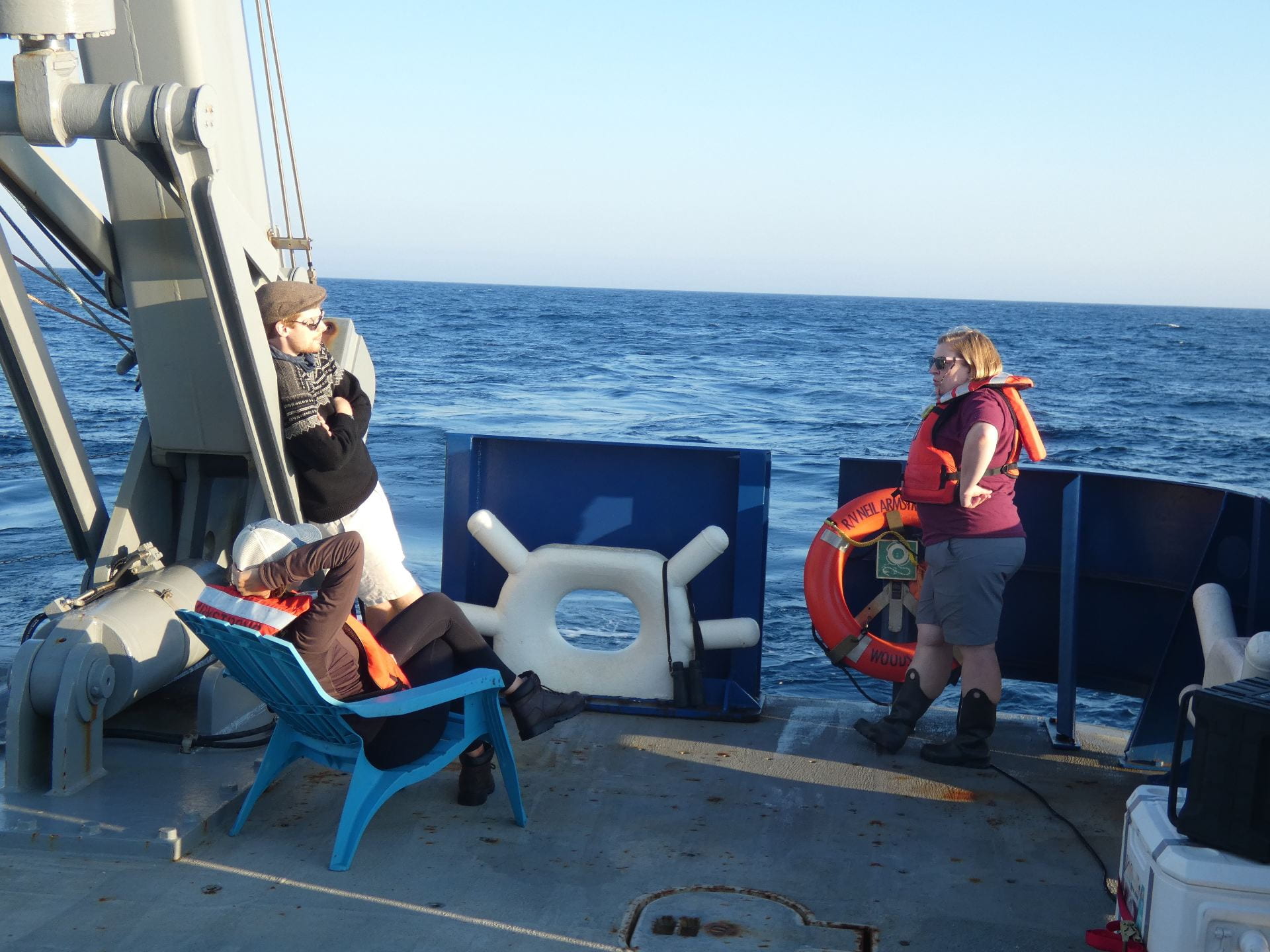
Thankfully, throughout the continuous operations, we were each able to find small moments to unwind and enjoy our time offshore. For example, when I asked Lukas one afternoon how his VMP shift had gone, he described a tranquil experience relaxing in a lounge chair on deck while eating a small plate of cheese and crackers and supervising the VMP. “It’s almost like being on a real cruise ship,” he told me.
The turbulence team enjoying the sun while the VMP is in the water
Despite the long days, working on the ocean was refreshing after a year of virtual work. The ocean’s moods were turbulent, changing from day to day. Sometimes the horizon remained mysterious, shrouded behind layers of mist and mantles of fog, while other times the dancing waves seemed as playful as the dolphins leaping through them. Each sunset cast gossamer films of gold across the water, followed by the iridescent shades of a moonrise. At night, the ocean merged into the sky and transformed into a yawning abyss, dimly illuminated by the Milky Way and occasional lightning bottled in distant thunderstorms. The water swallowed most light—even the bright ship lights we used when searching for squid brightened only a small turquoise patch (just enough to see squid flash by like quicksilver) before fading into ominous black waves.
After two weeks on a research vessel, I can’t deny that I’m more than a little exhausted—and I’m sure I’m not alone in these sentiments. But the energy supplied by our enthusiastic crew made the long sixteen-hour days fly by. Our team bonded over more than just the incredible science we were accomplishing—we chattered over EuroCup matches, shared movie nights and book discussions, and jigged for squid late into the night. When we reach land, I won’t only miss working on the waves, but also working with the amazing and dedicated crew aboard the AR58 cruise.
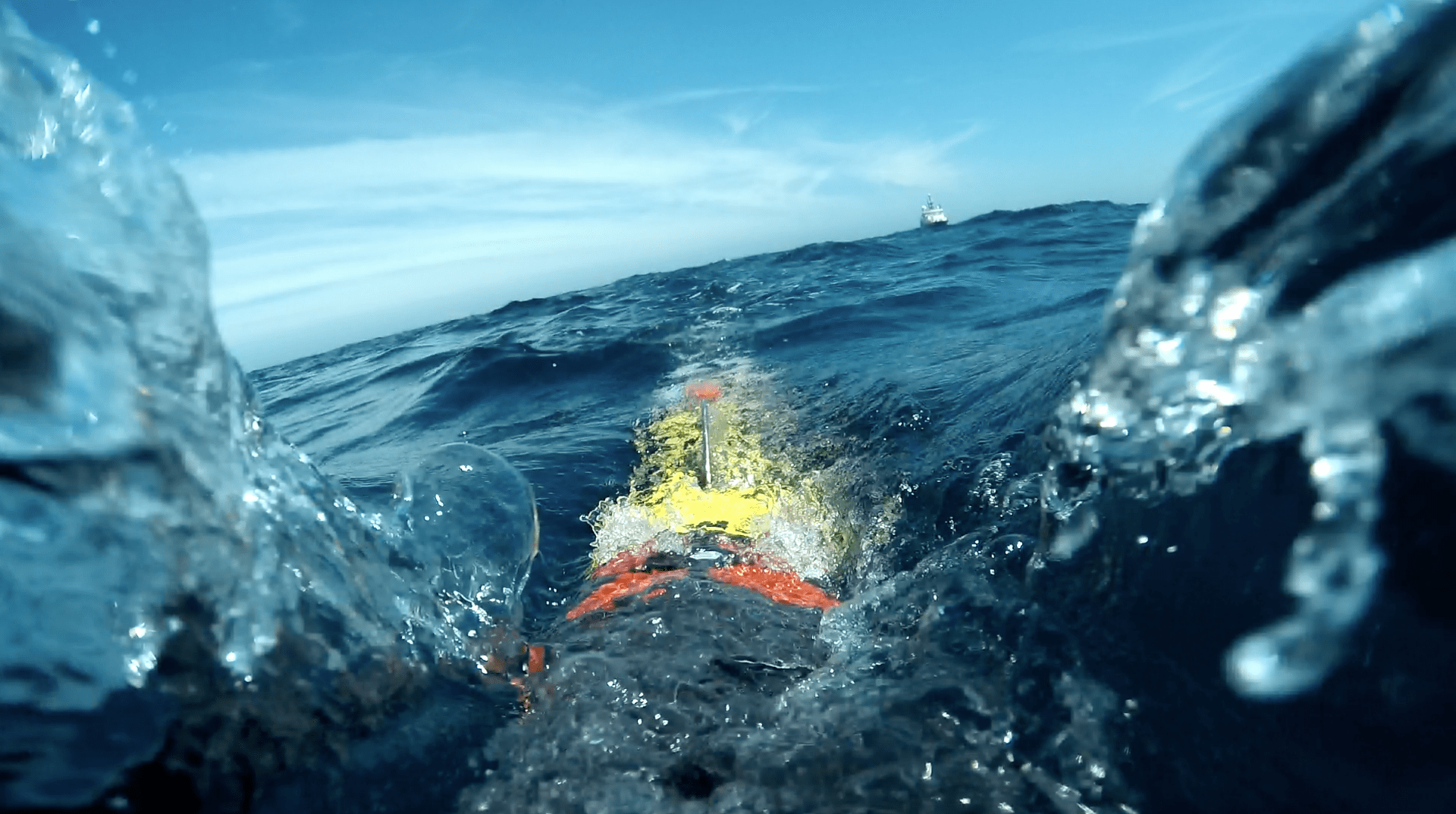
Polaris is our Long Range Autonomous Underwater Vehicle (LRAUV) developed by MBARI, different from the REMUS 100s not just in size and bright orange color, but in duration. The LRAUV was launched on Sunday of last week and with only a brief, couple of hours recovery on Friday to update code, the vehicle has been driving and gathering data on its own for the last ten days!
Launch of Polaris off the back of the Neil Armstrong captured by drone.
Polaris yo-yos through the water column measuring depth, temperature, salinity, dissolved oxygen, dissolved organic matter and light in the water. Every two hours it surfaces and uses satellite messages to send data back to shore, allowing the operators and scientists to monitor its progress and see a subset of the data it has collected. Using the same satellite messages, the operators can send commands and missions to the vehicle through a website on their phones. If anything goes wrong, Polaris will text them to let them know!
Polaris can be used to make lawnmower paths and cover a large area, but it is also capable of something more advanced—adaptive front tracking. When yo-yoing through a salinity intrusion, the salinity Polaris measures at 10, 20, 30, and 40 meters depths are very different from one another and are non-homogenous. When outside the intrusion, the salinity at these four depths are much more similar to one another, and are homogenous. Polaris uses this to determine if it is currently profiling through a salinity intrusion or not. When Polaris moves from a homogeneous salinity area, to a non-homogenous salinity area, it identifies the edge of the front. It continues to drive a certain distance and then turns around, heading back at an angle from its original direction until it hits the edge of the front again. This way it can move East or West, mapping the edge of the salinity intrusion!
Results from the first day of the Polaris frontal tracking mission showing its location along with the recorded maximum salinity per yo-yo. The letters show where Polaris turned after detecting the front.
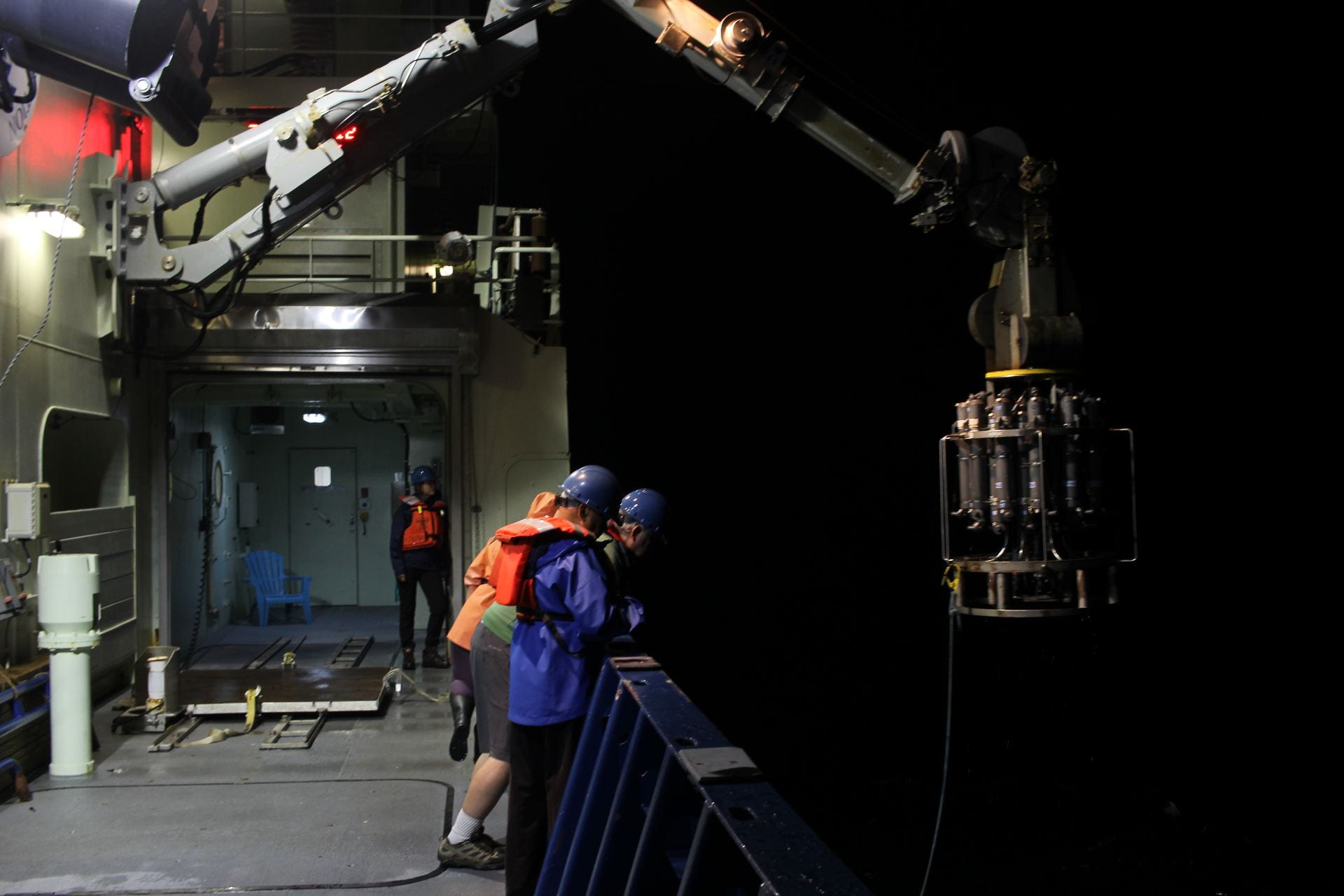
To estimate ocean flows, oceanographers study horizontal density variations throughout the oceans. However, bringing water back to the surface and putting it on a scale to measure density is both costly and prone to errors. Thus, in 1969 Neil Brown (WHOI) invented an instrument that simultaneously measures Conductivity (to calculate salinity), Temperature, and Depth, called “CTD.” With these three variables on hand, one can calculate the density of ocean water. Over time more and more instruments and bottles for collecting water samples got attached to the CTD, and today research vessels carry a ~500kg heavy carousel full of instrumentation that is simply called the CTD.
The CTD is used to get a rough overview of the ocean column setup in a particular area. The carousel gets lowered over the side of the research vessel and the winch operator brings it down until about 5m above the ocean floor. Meanwhile, the computers on the science deck broadcast the measured profile live which allows the science party to decide where to take water samples on the way up.
Night-time recovery of the CTD after a successful cast. Meanwhile, our chief scientists scan the water surface for squid that get attracted by the ship’s lights.
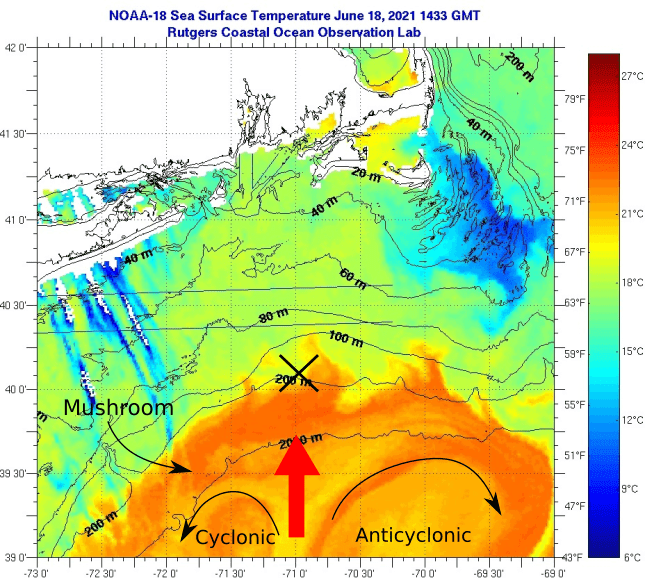
Lets talk about Warm Core Rings , the very important R in SIRATES. Rings, also referred to as eddies, are typically formed off a Gulf Stream meander. When the Gulf Stream detaches from the coast it begins to wiggle, when a large wiggle occurs it can pinch of and form a ring as pictured in the animation below. The rings that pinch off to the north are called Warm Core Rings due to the core of warm water from the Sargasso Sea. There are also rings that pinch off to the south with a cold slope water core called Cold Core Rings.
Once detached from the Gulf Stream, these rings move westward through the slope where they can hit the continental shelf. This is where rings become important for this project, transporting the the warm salty water that form the salinity intrusions northward onto the shelf.
In our current study area an interesting phenomena is happening. Not only is there a warm anticyclonic (clockwise) ring against the shelf, there is an adjacent cyclonic (counter clockwise) ring to the southwest. This ring pair feature is called a mushroom, and is fairly uncommon this close to the shelf. It is thought that these rings might be working together to help strengthening the intrusions’ northward flow over the shelf.
Sea surface temperature from June 18th marked to show the anticyclonic and cyclonic rings. The X marks our study area.
This fighting squid tells more of a story then you might think, featuring every part of the our project’s name SIRATES ( Salinity Intrusions, Rings, AUVs, Turbulence, and Squid). The background contour is real data from one of the Darter missions (one of the REMUSs) showing a salinity intrusion in light green in the upper right hand corner. The fighting squid is riding an AUV (a mix between a REMUS and LRAUV) and holding a VMP (which measures turbulence) . And of course we had to give the squid an eye patch.
What is the VMP?
The vertical microstructure profiler (VMP-250 by Rockland Scientific) is a loosely-tethered instrument which allows us to measure the small scales where energy dissipation and mixing occur. The profiler is equipped with two velocity-shear probes, so that turbulent kinetic energy (TKE) dissipation can be quantified even in well mixed areas. The shear probes are 8.5 mm long and 4.7 mm wide, and they directly measure small fluctuations in velocity-shear at a sampling rate of over 500 Hz. These probes can be thought of like record needles encased in silicone which measure tiny deflections due to the forces caused by fluctuations in velocity. The VMP also measures pressure (for depth), fluorescence (for chlorophyll-a), turbidity (for clarity), and conductivity (for salinity) with high precision and resolution.
Close up of the VMP probes.
How is the VMP deployed?
While the ship travels at 3-4 knots, the VMP is towed behind the vessel and “released” so that it free-falls vertically under its own negative buoyancy at a constant smooth velocity. This velocity is pre-determined by adjusting the weight of the profiler so that it falls at a velocity that optimizes the sampling resolution (in this case ~0.7 m/s). While the VMP is falling, the tether to the vessel must be slack, so that the motion of the ship is not felt by the instrument. When the VMP reaches the target depth (~50 meters for this experiment) it is retrieved using a deep sea electric fishing reel (Lundgren-Pitman S-1200) which pulls it back to the surface near the stern of the vessel, where it can be released again to take another profile at the new location. In this way we get a series of high resolution profiles in both space and time. This method of profiling s called “tow-yoing,” a combination of towing and yo-yoing.
What can we learn with the VMP?
Using the VMP, we will make high resolution measurements of temperature and velocity shear through the intrusions. These measurements enable us to determine the rate at which the intrusions are mixed and diffused by turbulence, which in turn plays a role in their onshore evolution and impact on shelf water mass properties. We will be looking out for wind events, internal tides, and solitary waves, all of which can generate shear and turbulence within the water column and potentially enhance the diffusion of the intrusions. We will also assess the competing role of thermohaline mixing via processes such as double diffusion and salt fingering in salinity intrusions.
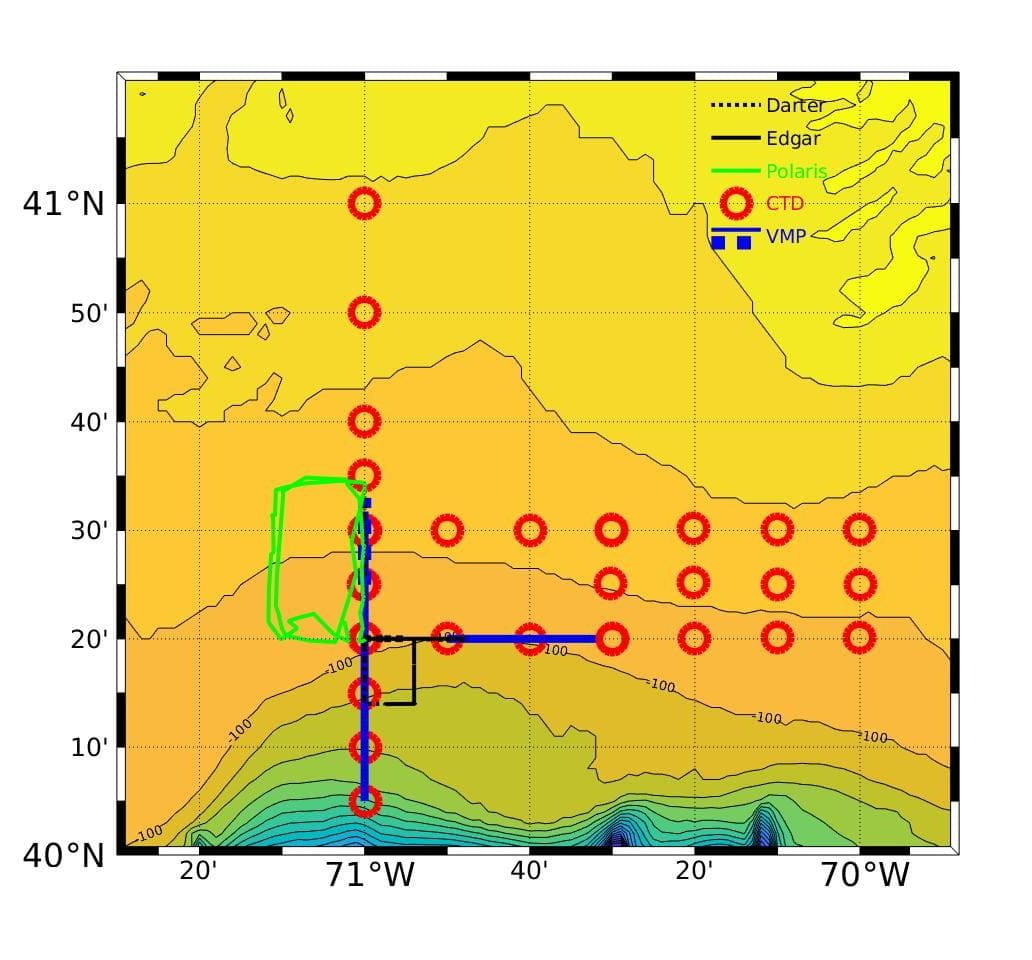
With one week down in the cruise and one to go we have some questions answered and many more generated. So far we have taken 32 CTD and 230 VMP casts and have covered 173.37 km with Polaris and 178.29 km with our two REMUS vehicles. These measurements have helped to map two different salinity intrusions in our study region.
A map of the study site showing the location of all data collected so far (Updated June 25th).
Below you can see a plot of the temperature versus salinity measurements from all 32 of our CTD casts until now. Temperature-Salinity scatter plots help oceanographers identify the different water masses present in our profiles. Intrusion water looks very different than the surrounding shelf waters. The intrusions are warm and salty, i.e., they appear in the upper right corner of the plot, whereas the shelf waters are cool and fresh and appear in the bottom left of the plot. The Z shaped profile is particularly unique to intrusion profiles. The relatively fresh but warm surface waters are in the upper limb of the ‘Z’, while the colder and saltier bottom waters follow along the lower limb of the ‘Z’.
TS plot showing the distinctly different water masses present in intrusion profiles. Red dots shows points from profiles with intrusions.
In the Week to Come . . .
Front tracking with AUVs. This morning Polaris was launched once again after a short recovery to recharge and is now off on a new mission – this time using its front tracking algorithm. This will hopefully outline the intrusion and give us an idea of its extent.
More CTDs and VMPs! The intrusion have been much patchier than expected and as much data as possible will be needed in order to get a complete 3D picture. The VMP’s turbulence measurements will also help us understand how long these features will last.
Squid squid squid! Though our first attempts of squid jigging were unsuccessful, we know they are out there and we will try again.