Polaris is our Long Range Autonomous Underwater Vehicle (LRAUV) developed by MBARI, different from the REMUS 100s not just in size and bright orange color, but in duration. The LRAUV was launched on Sunday of last week and with only a brief, couple of hours recovery on Friday to update code, the vehicle has been driving and gathering data on its own for the last ten days!

Polaris yo-yos through the water column measuring depth, temperature, salinity, dissolved oxygen, dissolved organic matter and light in the water. Every two hours it surfaces and uses satellite messages to send data back to shore, allowing the operators and scientists to monitor its progress and see a subset of the data it has collected. Using the same satellite messages, the operators can send commands and missions to the vehicle through a website on their phones. If anything goes wrong, Polaris will text them to let them know!
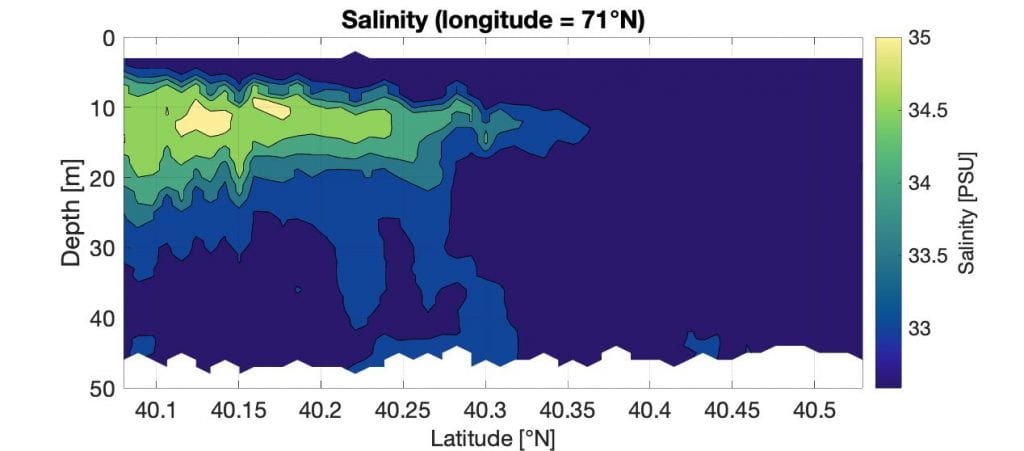
Polaris can be used to make lawnmower paths and cover a large area, but it is also capable of something more advanced—adaptive front tracking. When yo-yoing through a salinity intrusion, the salinity Polaris measures at 10, 20, 30, and 40 meters depths are very different from one another and are non-homogenous. When outside the intrusion, the salinity at these four depths are much more similar to one another, and are homogenous. Polaris uses this to determine if it is currently profiling through a salinity intrusion or not. When Polaris moves from a homogeneous salinity area, to a non-homogenous salinity area, it identifies the edge of the front. It continues to drive a certain distance and then turns around, heading back at an angle from its original direction until it hits the edge of the front again. This way it can move East or West, mapping the edge of the salinity intrusion!