
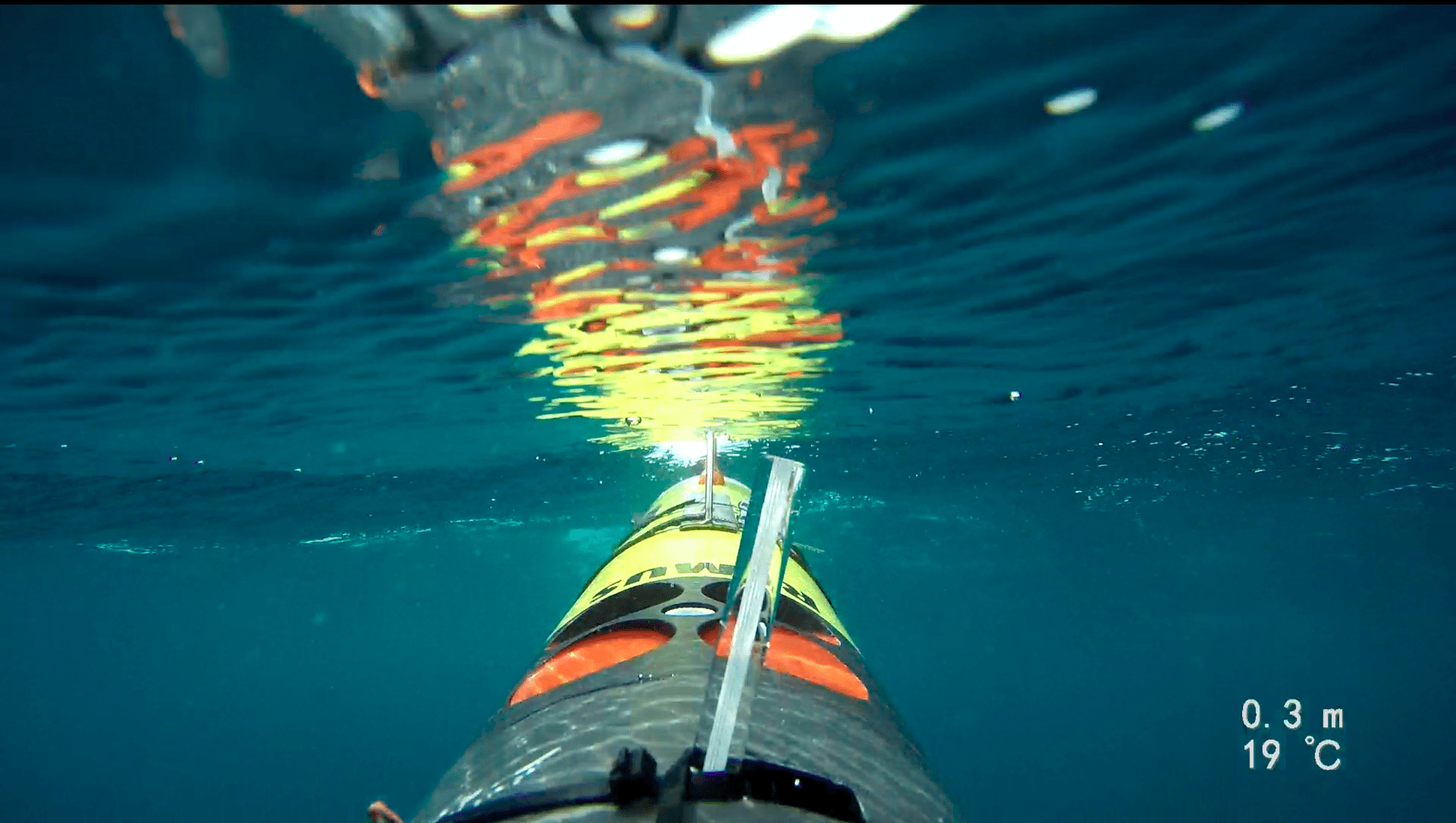
Today we sample a 40x40km area east of our home base along the 71°W longitude line. With CTD casts we want to get a first overview about the extent of a 2nd intrusion area. While steaming to our next station, let’s take the time to feature our underwater robots of the REMUS family. We have 3 Remus-100’s with us on board the Armstrong, Darter, Edgar, and Sellers. These vehicles have a depth rating of 100 meters.
How do the REMUS missions work?
The vehicles communicate differently when at the surface and while underwater. At the surface, they’re use Wifi, make satellite phone calls, and get GPS coordinates from satellite. However, none of these systems work underwater and signals between the ship and the REMUS get transferred acoustically.
The vehicles are equipped with a variety of instruments to measure temperature, salinity, nitrate, dissolved organic matter, water velocity, and many variables more. In addition, we can make videos with a GoPro. Depending on the mission, the instrumentation can be adapted.
How does the AUV-Team’s day look like:

After a daily discussion with the science team, our AUV-Team (Amy, Noa, and Maaya) choose the best suited Remus for the day’s mission data goals and prepare the vehicle for deployment. A so-called Towfish, the 25kHz transducer used to acoustically communicate with the vehicles, is secured to the boat railing and lowered into the water prior to deployment. Once the vehicle is in the water and communications between us and the vehicle are established, we send the vehicle on its mission and stay within acoustic range until it’s time for recovery.
For more information on the AUV’s and the SciBotics team head to their website linked here.