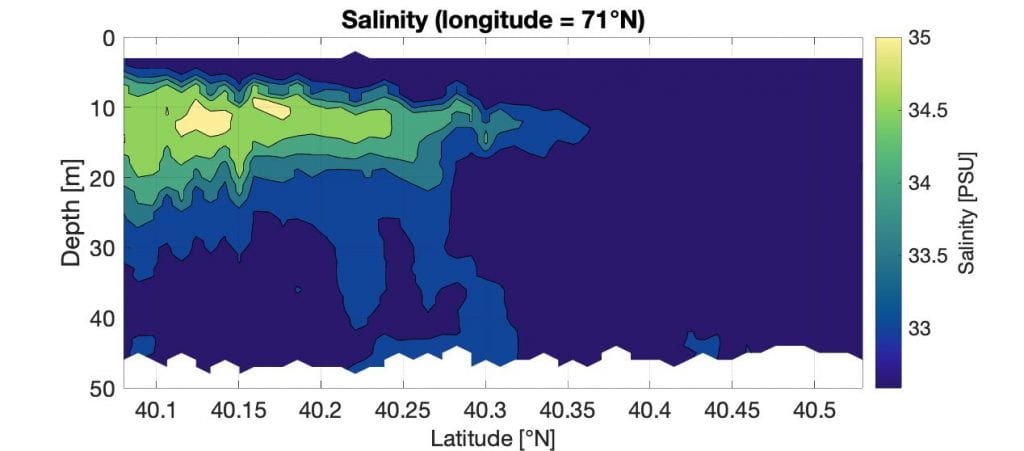
The squid jigging has began! A large component of this project is trying to understand the influence salinity intrusions have on short fin squid. It is thought that the squids begin their journey in the Gulf Stream and then ride Warm Core Rings and these salinity intrusions shore ward and onto the shelf.
Squids are unable to store fat, and therefore need to be continually consuming food. In addition squids can even turn cannibalistic if there isn’t enough food availability! This gives the squid carried in Warm Core Rings and in intrusion large advantages.
To see if there were squids at our intrusion spots we went out last night with fishing poles and cameras on sticks to capture the squid activity. At two of our intrusion spots squids were spotted! Unfortunately our jigging attempts were less successful, we will try again another night.
Try and spot the squid in the video linked bellow!